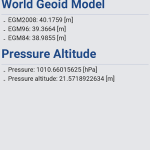
たりめーだ。
誰の役に立つんだぁ、てのはいつもの話。ワタシの興味だけでやっておる。
「磁偏差」が「ワタシにどう効いておるか」ってのは、本当のところは自分で測ってみないとよくわからんのだよねぇ、を突き詰めて、「自分で測れないかなぁ」と思ったのであった。
True North を知るには、「Magnet North と磁偏差があればわかる」。いや…その磁偏差を測りたいんですってば。
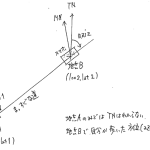
True North を知るには、アゲイン:

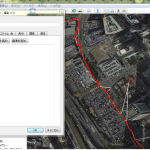
まっすぐな道を見つけて、両端の緯度経度を記録、その二地点の azimuth を測るってわけである。これで「ワタシは True North に対して azimuth 度に進んできた」ことがわかるってわけだ。
2地点の関係を知るためのライブラリとして、GeographicLib は公式に pure Python 版をリリースしている。site-packages ライブラリを制御出来ない kivyLauncher で使うためには是が非でも pure Python でなければならないので、もっと使いやすい pyproj よりも今はありがたい。置き場所にはちょっと困るのだが、「オレオレ標準」として /sdcard/kivy-my-site-packages なんて場所を作ってここに放り込み、このように使うことに:
1 import sys
2 sys.path.append("/sdcard/kivy-my-site-packages")
3 from geographiclib.geodesic import Geodesic
4 WGS84 = Geodesic.WGS84
あとは「二地点」の管理が必要だ。地点Aと地点Bはアプリケーションをずっと起動しっぱなしに出来るとは限らない。というか 500m 歩きながら起動しっぱなしなんてやだしムリ。ので、sqlite に記録しよう:
1 # -*- coding: utf-8 -*-
2 import os
3 import sqlite3
4 from math import degrees, radians, sin, cos
5 import cmath
6
7 _DBFILE = "./loc_log.dat"
8
9 def mean_of_angle(a):
10 rho = sum(cmath.rect(1, radians(d)) for d in a)
11 if abs(rho) < 1.0e-5:
12 return float('nan') # or None
13 rho /= len(a)
14 th = cmath.phase(rho)
15 return degrees(th)
16
17 class LocLog(object):
18 def __init__(self):
19 self._conn = self._open_connection()
20
21 def _open_connection(self):
22 conn = sqlite3.connect(_DBFILE)
23 cur = conn.cursor()
24 try:
25 cur.executescript('''\
26 CREATE TABLE t_loc_log (
27 mng_name TEXT,
28 lon FLOAT,
29 lat FLOAT,
30 compass_azimuth FLOAT);
31 ''')
32 conn.commit()
33 except:
34 pass
35 cur.close()
36
37 return conn
38
39 def insert(self, mng_name, lon, lat, compass_azimuth):
40 cur = self._conn.cursor()
41 cur.execute(
42 """INSERT INTO t_loc_log(mng_name, lon, lat, compass_azimuth)
43 VALUES (?, ?, ?, ?)""", (
44 mng_name, lon, lat, compass_azimuth))
45 self._conn.commit()
46 cur.close()
47
48 def select(self, mng_name):
49 cur = self._conn.cursor()
50 cur.execute("""SELECT lon, lat, compass_azimuth FROM t_loc_log
51 WHERE mng_name = ?""", (mng_name,))
52 lons = []
53 lats = []
54 azis = []
55 for row in cur:
56 lons.append(row[0])
57 lats.append(row[1])
58 azis.append(row[2])
59 cur.close()
60 if lons:
61 return (
62 mean_of_angle(lons),
63 mean_of_angle(lats),
64 mean_of_angle(azis))
65
66 if __name__ == '__main__':
67 import sys
68 log = LocLog()
69 print(log.select(sys.argv[1]))
管理は「地点Aと地点B」というセットをひとまとまりにしたいので、mng_name というカラムを持っているのだが、「A」と「B」を区別する必要もあって、これは mng_name の頭に Origin の「O」と Destination の「D」を付与するルールにした。
主キーなしで延々追記していくようになっていて、これは一定時間の平均を取りたかったため。
あとは UI は、
- mng_name を入力するテキストボックス
- 地点 A なのか地点 B なのかを特定するトグルボタン
- 記録開始終了ボタン
- 描画ボタン
として、地点A で記録、地点Bで記録、地点Bで描画。
1 from math import radians, degrees, sin, cos
2 from kivy.lang import Builder
3 from plyer import gps
4 from kivy.app import App
5 from kivy.properties import StringProperty
6 from kivy.clock import Clock, mainthread
7 from kivy.graphics import Color, Line
8 from kivy.logger import Logger
9 from my_compass import AndroidCompass
10 compass = AndroidCompass()
11 from loc_log import LocLog
12 import sys
13 sys.path.append("/sdcard/kivy-my-site-packages")
14 from geographiclib.geodesic import Geodesic
15 WGS84 = Geodesic.WGS84
16
17
18 kv = '''
19 BoxLayout:
20 orientation: 'vertical'
21
22 face: face
23 details: details
24 bottom_pane: bottom_pane
25
26 Label:
27 id: details
28 text: app.disp
29
30 Widget:
31 id: face
32 r: min(root.size) * 0.9 / 2
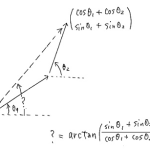
33
34 BoxLayout:
35 size_hint_y: None
36 height: '48dp'
37 padding: '4dp'
38 id: bottom_pane
39
40 TextInput:
41 on_text:
42 app.mng_name = args[1].strip()
43
44 ToggleButton:
45 text: 'Origin' if self.state == 'normal' else 'Destination'
46 on_state:
47 app.mode = 'D' if self.state == 'down' else 'O'
48
49 ToggleButton:
50 text: 'Log Start' if self.state == 'normal' else 'Log Stop'
51 on_state:
52 app.start() if self.state == 'down' else app.stop()
53
54 ToggleButton:
55 text: 'Draw Start' if self.state == 'normal' else 'Draw Stop'
56 on_state:
57 app.draw_start() if self.state == 'down' else app.draw_stop()
58 '''
59
60 class GpsCompassLogging(App):
61
62 disp = StringProperty()
63 mng_name = StringProperty()
64 mode = StringProperty('O')
65
66 def build(self):
67 self._locLog = LocLog()
68
69 self.gps = gps
70 self.gps.configure(on_location=self.on_location,
71 on_status=self.on_status)
72
73 compass.enable()
74
75 return Builder.load_string(kv)
76
77 def start(self):
78 self.lon = None
79 self.lat = None
80
81 self.gps.start()
82 self._clock_event = Clock.schedule_interval(self._do_record, 1.)
83
84 def stop(self):
85 self._clock_event.cancel()
86 self.gps.stop()
87 self.lon = None
88 self.lat = None
89
90 def _do_record(self, *args, **kwarg):
91
92 lon = self.lon
93 lat = self.lat
94 azimuth = compass.orientation[0]
95 self.disp = "({}, {}, {})".format(lon, lat, azimuth)
96 if lon is None or lat is None or azimuth is None:
97 return
98 self._locLog.insert(self.mode + self.mng_name, lon, lat, azimuth)
99
100 def draw_start(self):
101 self._clock_event2 = Clock.schedule_interval(self._do_draw, 1.)
102 ores = self._locLog.select("O" + self.mng_name)
103 dres = self._locLog.select("D" + self.mng_name)
104 self.invres = None
105 if not ores or not dres:
106 return
107
108 self.invres = WGS84.Inverse(ores[1], ores[0], dres[1], dres[0])
109
110 def draw_stop(self):
111 self._clock_event2.cancel()
112
113 def _do_draw(self, *args, **kwarg):
114 if not self.invres:
115 return
116
117 azimuth = compass.orientation[0]
118 #
119 # ------------------------------------------------
120 self.root.face.canvas.clear()
121 truenorth = radians(-self.invres['azi2'])
122 magnorth = radians(360 - azimuth)
123 tn_mn_diff = degrees(magnorth - truenorth) % 360
124 if tn_mn_diff > 180:
125 # 350 -> -10
126 # 190 -> -170
127 tn_mn_diff -= 360.
128 self.disp = "sl2 = {}[m]\nTN = {}\nMN = {}\nMN - TN= {}".format(
129 self.invres['s12'],
130 degrees(truenorth),
131 degrees(magnorth) % 360,
132 tn_mn_diff)
133
134 with self.root.face.canvas:
135 Color(0.2, 0.2, 0.7)
136 center_x, center_y = self.root.face.center_x, self.root.face.center_y
137 Line(points=[
138 center_x, center_y,
139 center_x + 0.8 * self.root.face.r * sin(truenorth),
140 center_y + 0.8 * self.root.face.r * cos(truenorth)
141 ], width=5, cap="round")
142
143 Color(0.7, 0.2, 0.2)
144 center_x, center_y = self.root.face.center_x, self.root.face.center_y
145 Line(points=[
146 center_x, center_y,
147 center_x + 0.8 * self.root.face.r * sin(magnorth),
148 center_y + 0.8 * self.root.face.r * cos(magnorth)
149 ], width=5, cap="round")
150 # ------------------------------------------------
151
152 @mainthread
153 def on_location(self, **kwargs):
154 self.lon = float(kwargs['lon'])
155 self.lat = float(kwargs['lat'])
156 #self.alt = float(kwargs['altitude'])
157 # azimuth = compass.orientation[0]
158
159 @mainthread
160 def on_status(self, stype, status):
161 pass
162
163 if __name__ == '__main__':
164 GpsCompassLogging().run()
繰り返しになるけれど、my_compass はここ。
android.txt はテキトー:
1 title=Simple GPS, Compass Logging
2 author=hhsprings
3 orientation=all
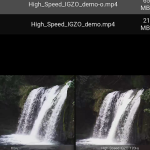
こんな:
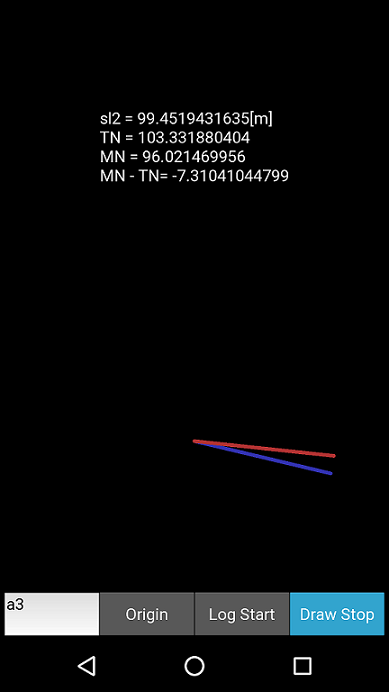
青が True North。赤が Magnetic North。上のテキストの sl2 は地点 A から地点 B までの距離。てわけで、100m 歩けば問題なく計測出来る。
やってみてどうかって?
微妙だよね。そもそも実際にやってみればわかることだけれど、「デバイスをまっすぐに進行方向に向ける」ことだって結構むつかしいんであって。(これに神経質になる必要があるのは地点B。)
あと結局のところは、感覚的に「確かに True North と Magnetic North はズレてる」ということだけはわかるものの、「平均モデルの西偏 7 度はどの程度正しいのか?」を知れるほどのもんではない。ちなみに磁場は太陽風の影響とかも受けますよ。それが効いてるのかどうかだって、これでわかるようなもんではない。
ケド、「確かにやってみれば」てのは結構大事で、理想と現実がどれほど違うのかを感覚的に知っとくのって、オモシロイと思う。